The fastest expert jugglers can make nearly 500 catches per minute, which translates into just 120 miliseconds per catch—faster than human reaction times even in high-speed sports like tennis, in which a player typically takes 200 milliseconds to adjust their performance. The Guinness world record for juggling is currently 11 balls. Troy Shinbrot, a biomedical engineer at Rutgers University, and Rutgers undergraduate math major Jonah Botvinick-Greenhouse explored the question of how expert jugglers can achieve these remarkable feats in a recent article in Physics Today.
Master jugglers are clearly very good at multitasking, and since balls aren’t being thrown randomly, each ball need not be tracked and caught independently. But Botvinick-Greenhouse and Shinbrot still wondered how it was possible for jugglers with reaction times of 200 milliseconds to routinely catch balls every 120 milliseconds. “Jugglers rely on making accurate throws and predictions of where the balls will travel,” the authors wrote. “The accuracy required is a measure of how unstable—and thus how difficult—a particular juggling pattern is.”
Juggling has a long and glorious history dating back to ancient Egypt; there are hieroglyphics circa 1994 and 1781 BCE that historians consider to be the earliest historical record of juggling. There were juggling warriors in China (770-476 BCE)—apparently it was viewed as an effective diversionary tactic—and the practice eventually spread to ancient Greece and Rome. By the mid-1800s CE, juggling was largely practiced by circus and street performers, and it has fascinated scientists since at least 1903. That’s when Edgar James Swift published a paper looking at the psychology and physiology of learning in the American Journal of Psychology, which discussed the rate at which students learned to toss two balls in one hand.
As Peter Beek and Arthur Lewbel wrote in a 1995 article in Scientific American:
[Juggling] is complex enough to have interesting properties and simple enough to allow the modeling of these properties. Thus, it provides a context in which to examine other, more complex fields… One is the study of human movement and the coordination of the limbs. Another is robotics and the construction of juggling machines. The third is mathematics: juggling patterns have surprising numerical properties.
Standard particle dynamics works fine as a model for juggling balls, while clubs and rings are best modeled as a rigid body system. Whatever the juggled objects of choice, they essentially follow a classic parabolic motion in periodic cycles—there’s just more than one object at play, and the various paths interweave. Since the number of possible patterns is small, one might think this would make it fairly easy to model the process mathematically. But variables like the angle of release, height of the throw, release velocity, and so forth ensure that no two throws or catches are precisely the same. The best jugglers can control all those variables with impressive consistency.

The advent of computers made it much easier to calculate the trajectories of balls and other commonly juggled objects. Famed MIT scientist Claude E. Shannon, the father of information theory, developed his “juggling theorem” in the 1970s, correlating ball position and hand action while juggling—that is, he found that there is a connection between how long the balls are in the juggler’s hands and how long they are in the air. The equation is (F+D)H=(V+D)N, where F is how long a ball is in the air, D is how long the ball is in a hand, H is the number of hands (two for human jugglers), V is how long a hand is empty, and N is how many balls are being juggled. Shannon applied his theorem to build his own juggling machines.
There are three basic patterns in juggling: the “cascade,” in which an odd number of balls are tossed from one hand to another (the most common pattern); the “fountain,” in which an even number of balls are thrown and caught with the same hand; and the “shower,” in which all the objects are tossed in a circle. There’s also the “multiplex,” where the juggler will throw more than one object from a single hand simultaneously.
The standard mathematical notation for juggling patterns is known as siteswap theory (aka quantum juggling, aka the Cambridge Notation), invented in 1981 by Paul Klimek and further developed in 1985 by Cambridge mathematicians Colin Wright and Adam Chalcraft (among others). Strings of numbers are used to represent the patterns, and the average of the numbers in the strings is equal to the number of balls being juggled in the pattern. For example, a simple three-ball pattern has a site swap of three (3,3,3), whereby each ball lands three beats after it is thrown.
As Botvinick-Greenhouse and Shinbrot wrote in their Physics Today article:
Just as a musical score defines how long each note is played, the digits in a siteswap define, roughly speaking, how long it takes for a ball to be caught after it has been thrown. More specifically, a siteswap digit defines the number of throws that pass before an object is thrown again. For this reason, even numbers represent throws back to the same hand, whereas odd numbers cross to the opposite hand.
In general, the height of the toss is proportional to how much time a juggler has between tosses. Back in 1995, Beek and Lewbel pointed out that the need for either greater speed or height increases rapidly with the number of objects being juggled, so the more objects being juggled, the more difficult the feat (and the longer it takes to master a particular trick). You can probably learn to juggle three balls in a few days, but four balls could take weeks or months to master, while five balls could take years.
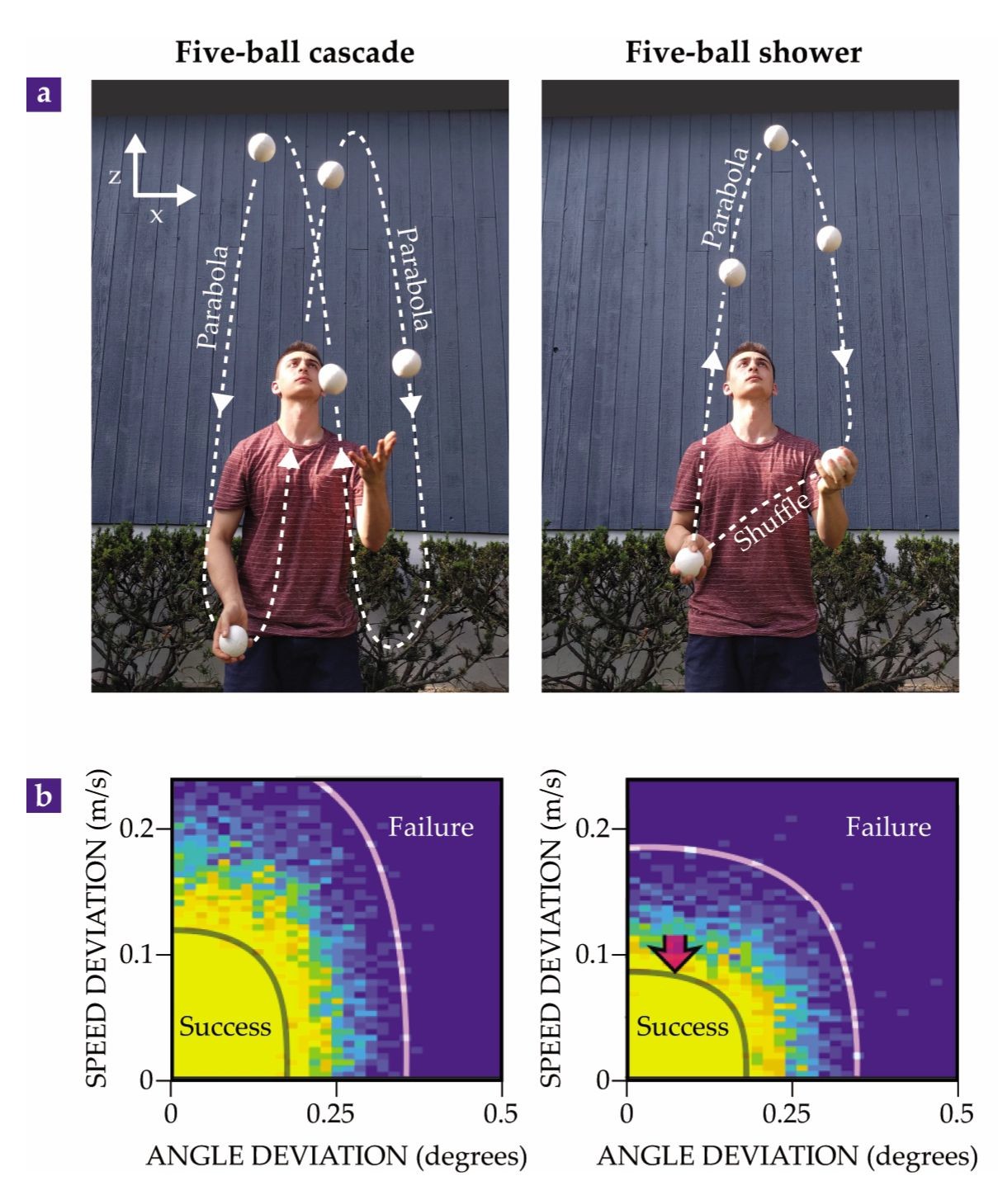
Botvinick-Greenhouse and Shinbrot performed simulations of parabolic trajectories of five-ball juggling patterns under gravity to investigate how sensitive the different patterns are to deviations in throw speed and angle. For instance, hand motions during a cascade are “left-right asymmetric,” which is why it is only possible to juggle an odd number of balls in that pattern. “It’s impossible to juggle an even number of balls in a cascade without breaking the asymmetry—for example, by throwing with both hands simultaneously or by throwing balls to different heights,” they wrote. A shower pattern, on the other hand, can be performed with even or odd numbers of balls because it lacks symmetry. While it’s simpler, in that regard, it’s more difficult to perform because the pattern is inherently less stable.
Based on their simulations, the duo concluded that cascade patterns can tolerate more variability in throw speed than the shower pattern. “In the shower pattern, each ball travels first through a parabola and then through a quick shuffle, whereas in the cascade, each ball must travel through two parabolas to return to its starting point,” the authors wrote. “So hands must move nearly twice as rapidly in the shower as in the cascade, which makes catches in the shower much more sensitive to timing.”
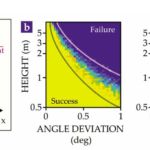
That’s why jugglers typically throw balls to greater heights in the shower pattern than in the cascade: they need a little more time between catches. But there’s a tradeoff: higher throws require much more control over the angle than lower throws. “When balls are thrown many meters high, throw angles must be accurate to within 0.1 degree,” they wrote. “That’s more than an order of magnitude tighter than is achievable by world-class athletes.”
Botvinick-Greenhouse and Shinbrot admit that it is still not clear exactly how expert jugglers manage such high accuracy and fast response times, given known physiological limits. But they cite a 2004 study published in Nature that found human and monkey brains are both capable of computing trajectories via dynamical prediction, thanks to some kind of internal representation of physical laws of motion. “Just as an outfielder predicts where a fly ball will land, a juggler predicts trajectories from how balls are thrown,” they wrote. Muscle memory likely also plays a role.
In short, “Complex tasks like juggling can be successfully performed without understanding the physiology behind motor control, although a deeper understanding is both intriguing and useful,” Botvinick-Greenhouse and Shinbrot concluded. “Unraveling the secrets behind how our nervous systems pull that off may pave the way for more dexterous robots.”
 +1-786-628-7980
+1-786-628-7980
 Sign Up/Sign In
Sign Up/Sign In