Los robots son geniales para hacer lo que se les dice. Pero a veces la introducción de esa información en un sistema es un proceso mucho más complejo que la tarea que les pedimos que ejecuten. Esa es parte de la razón por la que son más adecuados para trabajos simples / repetitivos.
Un equipo de investigadores de la Universidad Brown y el MIT está trabajando para desarrollar un sistema en el que los robots puedan planificar tareas mediante el desarrollo de conceptos abstractos de objetos e ideas del mundo real basados en las habilidades motoras. Con este sistema, los robots pueden realizar tareas complejas sin atascarse en las minucias necesarias para completarlas.
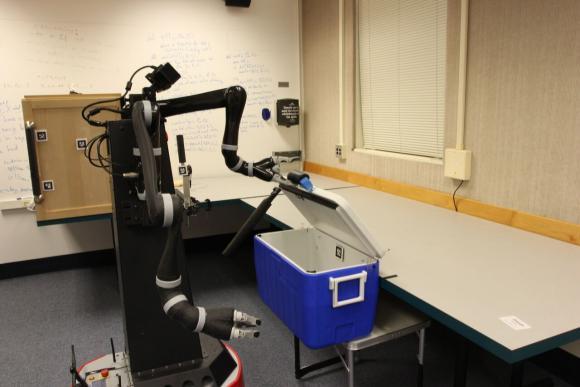
Los investigadores programaron un robot de dos brazos (Anatema Device o “Ana”) para manipular objetos en una habitación: abrir y cerrar un armario y un refrigerador, encender un interruptor de luz y recoger una botella. Mientras realizaba las tareas, el robot estaba asimilando su entorno y procesando información a través de algoritmos desarrollados por los investigadores.
Según el equipo, el robot pudo aprender conceptos abstractos sobre el objeto y el entorno. Ana pudo determinar que las puertas deben cerrarse para poder abrirlas.
“Ella aprendió que la luz dentro del armario era tan brillante que blanqueaba sus sensores”, escribieron los investigadores en un comunicado que anunciaba sus hallazgos. “Entonces, para manipular la botella dentro del armario, la luz tenía que estar apagada. También aprendió que para apagar la luz, la puerta del armario tenía que estar cerrada, porque la puerta abierta le bloqueaba el acceso al interruptor “.
Una vez procesado, el robot asocia un símbolo con uno de estos conceptos abstractos. Es una especie de lenguaje común desarrollado entre el robot y el humano que no requiere una codificación compleja para ejecutarse. Este tipo de calidad adaptativa significa que los robots podrían ser mucho más capaces de realizar una mayor variedad de tareas en entornos más diversos al elegir las acciones que necesitan realizar en un escenario determinado.

“Si queremos robots inteligentes, no podemos escribir un programa para todo lo que deseamos que hagan”, dijo a TechCrunch George Konidaris, profesor asistente de la Universidad Brown que dirigió el estudio. “Tenemos que ser capaces de darles objetivos y hacer que generen un comportamiento por sí mismos”.
Por supuesto, pedirle a cada robot que aprenda de esta manera es igualmente ineficiente, pero los investigadores creen que pueden desarrollar un lenguaje común y crear habilidades que puedan descargarse a un nuevo hardware.
“Creo que lo que sucederá en el futuro es que habrá bibliotecas de habilidades, y puede descargarlas”, explica Konidaris. “Puedes decir: ‘Quiero la biblioteca de habilidades para trabajar en la cocina’, y eso vendrá con la biblioteca de habilidades para hacer cosas en la cocina”.
 +1-786-628-7980
+1-786-628-7980
 Sign Up/Sign In
Sign Up/Sign In